SplaTAM Changing 3D Reconstruction
Researchers: Nikhil Keetha, Jay Karhade, Krishna Murthy Jatavallabhula, Gengshan Yang, Sebastian Scherer, Deva Ramanan, and Jonathon Luiten
By Ashlyn Lacovara
Media InquiriesIn the realm of robotics and computer vision, one of the most challenging things to navigate is unknown environments. This has inspired the innovation of new technology to improve scene understanding through 3D reconstruction. Among these advancements stands SplaTAM (Splat, Track & Map), a new approach to Simultaneous Localization and Mapping (SLAM).
SLAM is the process by which a robot or device builds a map of its environment while simultaneously localizing itself within that map. This process is crucial for various applications, from autonomous navigation to augmented reality. Traditionally, SLAM methods have faced limitations, particularly in handling complex, unstructured environments where they struggle to maintain a practical trade-off between accuracy and efficiency.
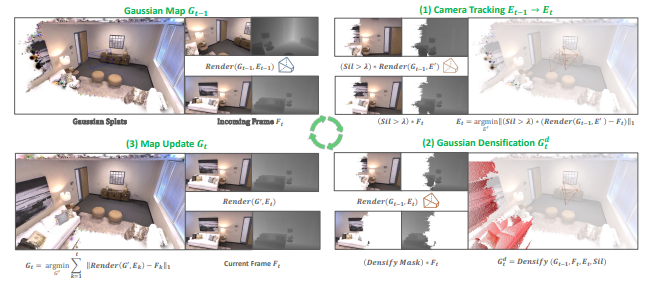
This is where SplaTAM comes into play; it is a solution that tackles these challenges directly. By using 3D Gaussians as its map representation & Splatting as the technique, SplaTAM brings a higher level of precision and efficiency to SLAM. To explain what 3D Gaussian Splatting does, imagine you're trying to create a 3D map of your surroundings using points. Usually, each point just marks a single spot, like putting a dot on a grid. But, with 3D Gaussian Splatting, each point spreads out a bit like spilled paint. This spreading helps to capture more detail and makes the map smoother, like how paint blends on a canvas.
So, when SplaTAM uses 3D Gaussian Splatting, it's like upgrading from drawing with dots to painting with smooth strokes. This makes its maps more precise and detailed compared to traditional methods.
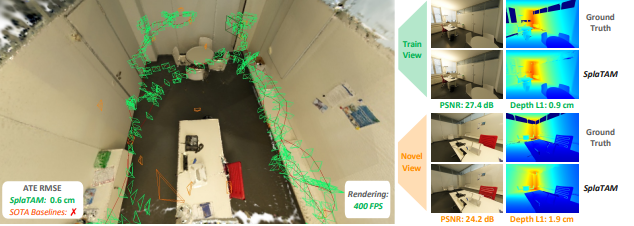
SplaTAM offers the benefit of fast optimization through Gaussian Splatting, which can generate images for optimization at speeds up to 400 frames per second (FPS). This rapid pace not only allows for real-time optimization but also facilitates the application of dense photometric loss in SLAM. Dense photometric loss is a technique in computer vision and image processing used to assess differences in image appearance. Previously, computational constraints hindered this capability. Additionally, SplaTAM ensures precise camera tracking by clearly defining mapped areas within a scene through its explicit spatial mapping. This overcomes the limitations associated with prior function-based map representations.
The versatility of SplaTAM is another aspect that sets it apart. Its volumetric representation enables scalability and editability, allowing users to expand the map capacity and edit parts of the scene without sacrificing photorealism. This flexibility opens up a lot of possibilities for applications in various industries, from robotics to virtual reality.
In testing across different datasets, SplaTAM has consistently outperformed existing methods in camera pose estimation and map construction. Its ability to handle large motions between camera positions and excel in texture-less environments demonstrates its capabilities in real-world scenarios.
In conclusion, SplaTAM represents a new step in visual SLAM technology, offering a cohesive framework for robotics applications in real-world scenarios. Its integration of 3D Gaussian Splatting sends SLAM into a new era of dense information and efficiency, unlocking a multitude of possibilities for exploration in diverse environments. As SplaTAM continues to evolve, it stands as a testament to human ingenuity in the field of robotics and computer vision.